Yapısı, Çeşitleri, Çalışması, Ölçüm ve Kontrolleri
Elektrik enerjisini mekanik enerjiye dönüştüren sistemler arasında en yaygın kullanılan motorlardan biri doğru akım motorlarıdır (DC Motorlar). Özellikle otomotiv teknolojisi, endüstriyel otomasyon sistemleri, robotik uygulamalar, CNC tezgâhları, elektrikli araçlar ve hassas hareket kontrolü gerektiren sistemlerde doğru akım motorları önemli bir yere sahiptir.
Motorlu araçlar teknolojisi alanında eğitim gören öğrencilerin doğru akım motorlarının yapısını, çalışma prensibini ve kontrol yöntemlerini iyi bilmesi gerekir. Çünkü araçlarda kullanılan silecek motorları, kalorifer fan motorları, cam kaldırma motorları, koltuk ayar motorları ve birçok yardımcı sistem doğru akım motorları ile çalışmaktadır.
Bu makalede doğru akım motorlarının yapısını, çeşitlerini, çalışma prensiplerini ve ölçüm-kontrol işlemlerini ayrıntılı olarak inceleyeceğiz.
Doğru Akım Motorlarının Yapısı
Doğru akım motorları elektrik enerjisini dönme hareketine dönüştüren elektromekanik cihazlardır. Temel olarak aşağıdaki parçalardan oluşurlar:
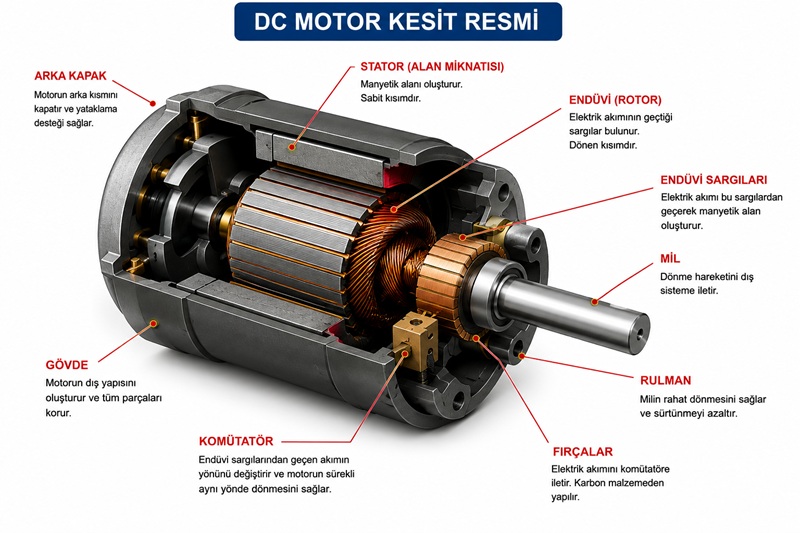
1. Endüvi (Rotor)
Motorun dönen kısmıdır. Endüvi üzerine sarılmış iletken sargılar bulunur. Elektrik akımı bu sargılardan geçtiğinde manyetik alan oluşur ve dönme hareketi meydana gelir.
2. Stator
Motorun sabit kısmıdır. Manyetik alanın oluşmasını sağlar. Küçük DC motorlarda kalıcı mıknatıs kullanılırken büyük motorlarda elektromıknatıs kullanılabilir.
3. Komütatör
Doğru akım motorlarının en önemli parçalarından biridir. Endüvi dönerken sargılardan geçen akımın yönünü değiştirerek motorun sürekli aynı yönde dönmesini sağlar.
4. Fırçalar
Karbon malzemeden üretilir. Güç kaynağından gelen elektriği komütatöre aktarır. Zamanla aşınan parçalardır ve periyodik bakım gerektirir.
5. Mil ve Rulmanlar
Motorun dönme hareketini dış sisteme aktaran mekanik parçalardır. Rulmanlar sürtünmeyi azaltarak sessiz ve verimli çalışma sağlar.
6. Gövde
Motorun tüm parçalarını koruyan dış yapıdır. Aynı zamanda mekanik dayanım sağlar.
Doğru akım motorlarının yapısını daha iyi anlamak için sitemizde bulunan elektrik-elektronik eğitim içeriklerini de inceleyebilirsiniz. Özellikle motor teknolojileri konusunda hazırlanan eğitim notları öğrenciler için önemli kaynak niteliğindedir.
Doğru Akım Motorlarının Çeşitleri
Doğru akım motorları kullanım amacına göre farklı türlerde üretilmektedir.
Seri Motorlar
Seri motorlarda endüvi sargısı ile alan sargısı seri bağlanmıştır.
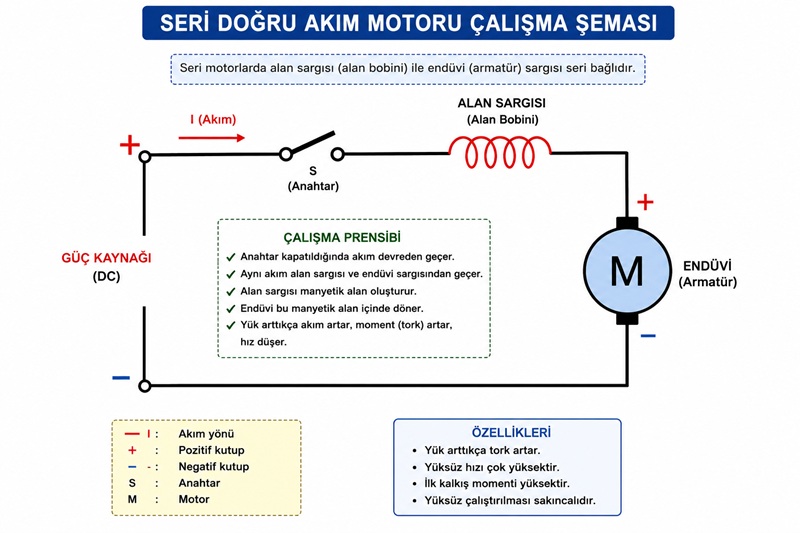
Özellikleri
- İlk kalkış momenti çok yüksektir.
- Yük arttıkça hızı düşer.
- Yüksüz çalıştırılması sakıncalıdır.
- Yüksek çekiş kuvveti sağlar.
Kullanım Alanları
- Marş motorları
- Vinç sistemleri
- Asansörler
- Elektrikli lokomotifler
- Ağır yük taşıma sistemleri
Otomobillerde kullanılan marş motorları seri motorlara güzel bir örnektir. Marş anında motorun krank milini döndürebilmek için yüksek torka ihtiyaç duyulur.
Servo Motorlar
Servo motorlar belirli bir açıyı veya konumu hassas şekilde kontrol edebilen motorlardır.
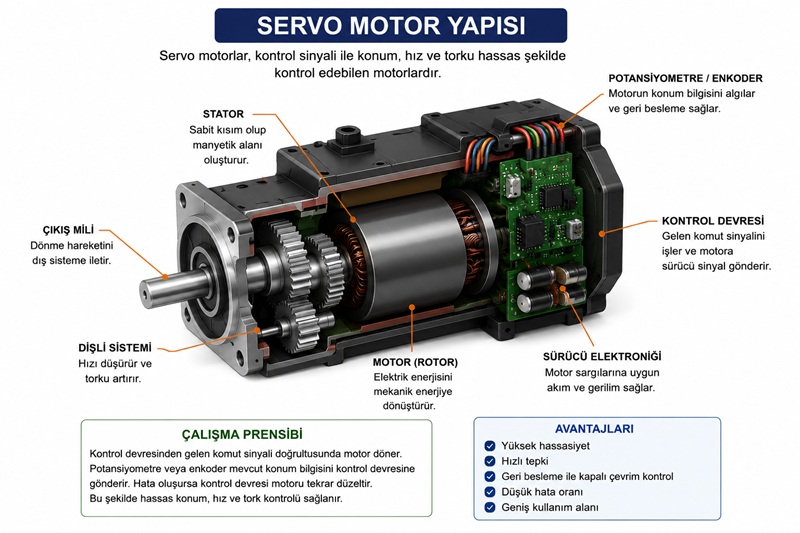
Özellikleri
- Hassas konum kontrolü sağlar.
- Geri besleme sistemi bulunur.
- Hız ve açı kontrolü yapılabilir.
- Yüksek doğrulukla çalışır.
Kullanım Alanları
- Robotik sistemler
- CNC tezgâhları
- Endüstriyel otomasyon
- Kamera sistemleri
- Uçak kontrol sistemleri
Servo motorlarda genellikle potansiyometre veya enkoder gibi geri besleme elemanları kullanılır. Bu sayede motorun hangi konumda olduğu sürekli kontrol edilir.
Günümüzde otomotiv sektöründe kullanılan birçok otomatik kontrol sisteminde servo motorlardan yararlanılmaktadır.
Step Motorlar (Adım Motorları)
Step motorlar elektrik darbelerini belirli açısal hareketlere dönüştüren motorlardır.
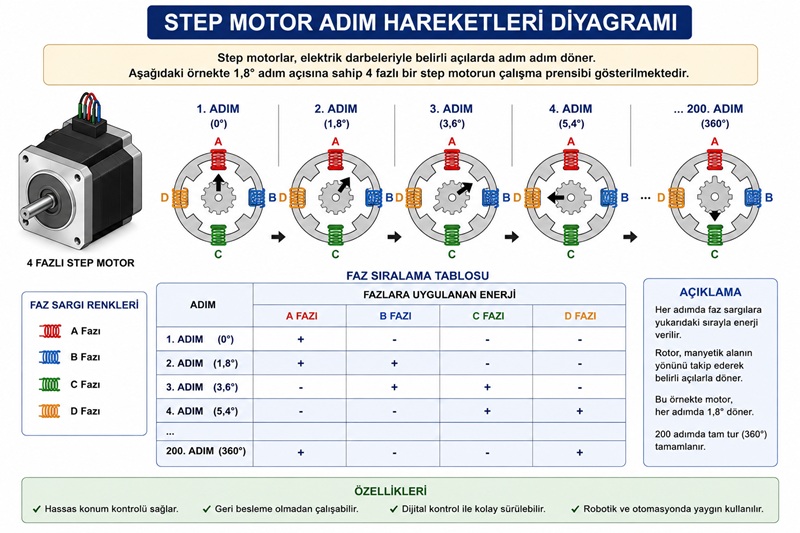
Özellikleri
- Her elektrik darbesinde belirli bir açı döner.
- Konum kontrolü kolaydır.
- Hassas hareket sağlar.
- Geri besleme olmadan da çalışabilir.
Kullanım Alanları
- 3D yazıcılar
- CNC makineleri
- Yazıcılar
- Otomasyon sistemleri
- Robotik uygulamalar
Örneğin 1,8° adım açısına sahip bir step motor 200 adımda tam tur döner.
Bu özellik sayesinde son derece hassas pozisyonlama yapılabilir.
Doğru Akım Motorlarının Çalışma Prensibi
Doğru akım motorlarının çalışması elektromanyetik kuvvet prensibine dayanır.
Motorun çalışması şu şekilde gerçekleşir:
- Güç kaynağından doğru akım uygulanır.
- Akım fırçalardan komütatöre ulaşır.
- Komütatör akımı endüvi sargılarına aktarır.
- Endüvi üzerinde manyetik alan oluşur.
- Statorun manyetik alanı ile etkileşim meydana gelir.
- İtme ve çekme kuvvetleri oluşur.
- Rotor dönmeye başlar.
- Komütatör akım yönünü sürekli değiştirerek dönüşün devam etmesini sağlar.
Motor içerisindeki iletkene etki eden kuvvet aşağıdaki fizik kuralına göre oluşur:
- Manyetik alan
- Elektrik akımı
- İletken uzunluğu
bir araya geldiğinde iletken üzerine kuvvet uygulanır.
Bu prensip elektrik motorlarının temel çalışma mantığını oluşturur.
Doğru Akım Motorlarında Dönme Yönünün Değiştirilmesi
DC motorların en önemli avantajlarından biri dönüş yönünün kolayca değiştirilebilmesidir.
Bunun için:
- Besleme uçlarının kutupları değiştirilir.
Artı ve eksi bağlantıları yer değiştirdiğinde motor ters yönde dönmeye başlar.
Bu özellik;
- Cam kaldırma motorlarında
- Koltuk ayar motorlarında
- Merkezi kilit sistemlerinde
- Robotik uygulamalarda
yaygın olarak kullanılmaktadır.
Doğru Akım Motorlarında Hız Kontrolü
DC motorların hızını kontrol etmek oldukça kolaydır.
Gerilim Değiştirme
Motora uygulanan gerilim arttıkça hız artar.
Örnek:
- 6 Volt → Düşük hız
- 12 Volt → Normal hız
- 24 Volt → Yüksek hız
PWM Kontrolü
Modern sistemlerde PWM (Pulse Width Modulation) yöntemi kullanılmaktadır.
PWM sayesinde:
- Enerji tasarrufu sağlanır.
- Isınma azalır.
- Hassas hız kontrolü yapılır.
Araç kalorifer fanlarında ve elektrikli araç sistemlerinde PWM kontrolü yaygın olarak kullanılmaktadır.
Doğru Akım Motorlarının Avantajları
DC motorların tercih edilme nedenleri şunlardır:
- Basit yapıya sahiptir.
- Hız kontrolü kolaydır.
- İlk kalkış momenti yüksektir.
- Yön değiştirme işlemi kolaydır.
- Düşük gerilimlerde çalışabilir.
- Otomasyon sistemlerine uygundur.
Doğru Akım Motorlarının Dezavantajları
Bazı olumsuz yönleri de bulunmaktadır:
- Fırça aşınmaları oluşur.
- Komütatör bakım gerektirir.
- Kıvılcım oluşabilir.
- Düzenli bakım ister.
- Yüksek hızlarda aşınma artar.
Bu nedenle günümüzde bazı uygulamalarda fırçasız DC motorlar tercih edilmektedir.
Doğru Akım Motorlarında Ölçüm ve Kontroller
Bir doğru akım motorunun arızalı olup olmadığını anlamak için çeşitli ölçüm ve kontrol işlemleri yapılır.

Görsel Kontrol
Öncelikle motor gözle incelenir.
Kontrol edilen noktalar:
- Kablo kopukluğu
- Yanık izleri
- Fırça aşınması
- Komütatör yüzeyi
- Mekanik hasarlar
Direnç Ölçümü
Multimetre ile sargı direnci ölçülür.
Kontrol sırasında:
- Sonsuz direnç görülüyorsa kopukluk vardır.
- Çok düşük direnç varsa kısa devre olabilir.
Süreklilik Testi
Multimetrenin buzzer konumu kullanılır.
Bu test sayesinde:
- Sargı kopuklukları
- Kablo arızaları
- Bağlantı problemleri
tespit edilebilir.
İzolasyon Kontrolü
Megger cihazı kullanılarak yapılır.
Sargı ile gövde arasında kaçak olup olmadığı belirlenir.
Özellikle endüstriyel motorlarda son derece önemlidir.
Akım Ölçümü
Pens ampermetre ile ölçülür.
Motorun çektiği akım katalog değerleri ile karşılaştırılır.
Yüksek akım;
- Sıkışma
- Rulman arızası
- Sargı kısa devresi
gibi problemlere işaret edebilir.
Gerilim Ölçümü
Motor çalışırken uç gerilimi ölçülür.
Gerilim düşükse:
- Akü arızası
- Kablo kayıpları
- Röle arızası
- Sigorta problemleri
araştırılır.
Fırça Kontrolü
Fırçalar düzenli olarak incelenmelidir.
Kontrol edilir:
- Uzunluk
- Yay basıncı
- Temas yüzeyi
Aşınmış fırçalar değiştirilmelidir.
Komütatör Kontrolü
Komütatör yüzeyi:
- Pürüzsüz
- Temiz
- Parlak
olmalıdır.
Yanık veya oluklu yüzeyler performans düşüklüğüne neden olur.
Otomotiv Sistemlerinde Kullanılan Doğru Akım Motorları
Modern araçlarda onlarca DC motor bulunmaktadır.
Bunlardan bazıları:
- Marş motoru
- Silecek motoru
- Kalorifer fan motoru
- Cam kaldırma motoru
- Sunroof motoru
- Yakıt pompası motoru
- Koltuk ayar motoru
- Merkezi kilit motoru
- Ayna ayar motoru
- Elektrikli direksiyon destek motorları
Motorlu Araçlar Teknolojisi öğrencileri için bu sistemlerin çalışma mantığını öğrenmek, araç elektrik sistemlerini anlayabilmek açısından büyük önem taşımaktadır.
Bu konuyla ilgili daha fazla teknik içerik, modül, ders notu ve uygulama örneklerine www.motordersi.com üzerinden ulaşabilirsiniz. Ayrıca sitede yer alan elektrik-elektronik, otomotiv elektriği ve araç konfor sistemleri içerikleri de doğru akım motorlarının kullanım alanlarını daha iyi anlamanıza yardımcı olacaktır.
Sonuç
Doğru akım motorları, elektrik enerjisini mekanik enerjiye dönüştüren ve özellikle otomotiv sektöründe yaygın olarak kullanılan motorlardır. Basit yapıları, yüksek kalkış momentleri ve kolay hız kontrolü sayesinde günümüzde birçok sistemin vazgeçilmez parçası haline gelmişlerdir.
Seri motorlar yüksek tork gerektiren uygulamalarda, servo motorlar hassas konum kontrolü gereken sistemlerde, step motorlar ise adım adım hareket gerektiren uygulamalarda kullanılmaktadır. Bu motorların yapısını, çalışma prensibini ve ölçüm yöntemlerini öğrenmek Motorlu Araçlar Teknolojisi alanında eğitim gören öğrenciler için temel mesleki yeterliliklerden biridir.
Doğru akım motorlarının bakım ve kontrollerinin düzenli yapılması hem motor ömrünü uzatır hem de sistemlerin güvenli ve verimli çalışmasını sağlar.




İlk yorumu siz yazın
Konu hakkında görüş, soru veya ek bilgi paylaşabilirsiniz.